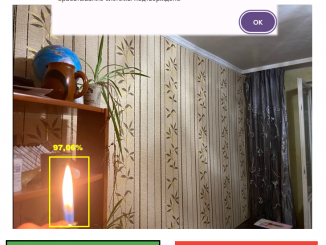
Система распознавания и сигнализирования возгораний
Создана система, способная обнаруживать пожары с высокой точностью и скоростью. Использование глубоких нейронных сетей позволило эффективно анализировать и классифицировать визуальные данные, что сделало систему надежной […]

Метеостанция с оценкой вероятности изменения погоды
Разработана метеостанция с оценкой вероятности изменения погоды, позволяющая пользователям эффективно управлять своим временем, а также выполнять действия в повседневной жизни. Метеостанция способствует уменьшению потраченного времени […]



Участники СНИЛ
Коллектив СНИЛ «Робототехника» сформирован как добровольное объединение студентов и преподавателей . В составе СНИЛ созданы группы, занимающиеся изучением различных направлений робототехники и механотроники, 3D моделирования […]

Мобильный холодильник
На базе СНИЛ «Робототехника» была разработана действующая модель носимого холодильника, позволяющего формировать определённый температурный профиль для транспортировки медикаментов, вакцин и других объектов. Устройство имеет WEB-интерфейс […]