
Перед соревнованиями по робототехнике среди учащихся было решено «»прокачать» платформу Роббо для качественного следования робота по линии. Выбрана самая простая для реализации схема датчика — набор чередующихся светодиодов и фототранзисторов, работающих в инфракрасной области спектра. Всего использовано 5 пар компонентов. Принципиальная схема датчика представлена на рисунке 1.

Чтобы разработка была быстрая, но в то же время экономичная, все детали монтировались на макетную печатную плату D1MG-PCB-A (Рисунок 2)

Далее произвели монтаж радиокомпонентов. Устройство приобрело вид, представленный на рисунке 3. Токоограничивающие и резисторы смещения были выбраны в SMD корпусе, поскольку занимают мало места, что позволит создать более компактный корпус.

После тестирования электронной части приступили к моделированию корпуса датчика, поскольку в закрытом состоянии он будет не только «радовать глаз», но и станет более стойким к внешним воздействиям.
При моделировании была поставлена задача как можно больше упростить конструкцию, но в то же время сделать её удобной, с возможностью сборки-разборки минимальными средствами.
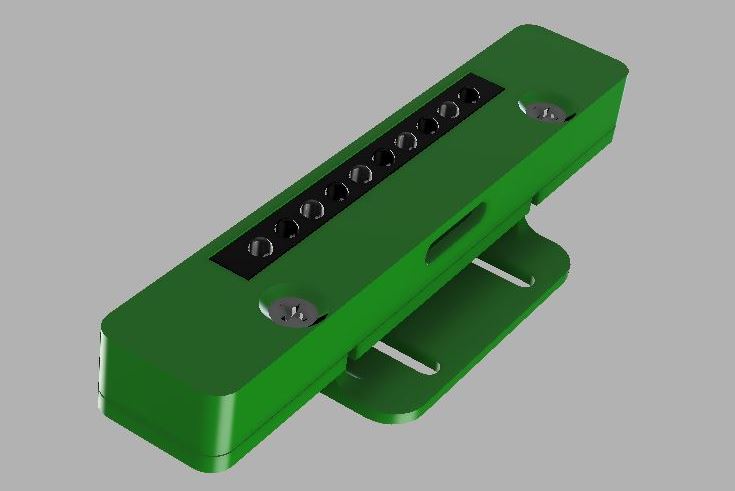
В итоге, корпус датчика состоит из 4 частей: кронштейн крепления, верхняя крышка, основная часть корпуса и маска датчиков (необязательный элемент). Также используется крепёж: два винта с конусной шляпкой М3×12, пропущенные сквозь корпус, и две гайки, расположенные в верхней крышке впотай.


Анимация датчика в сборе и процесс разбора корпуса представлен на следующем видео:
Детали корпуса были изготовлены на FDM принтере с использованием ABS пластика. После 3D-печати деталей корпуса и их подгонки собрали корпус воедино (Рисунок 5).

После сборки датчик был закреплен на робоплатформе и написано тестовое программное обеспечение для проверки его работы.
В итоге, мы получили новый датчик, позволяющий исследовать работу PID-регулятора на платформе Роббо и участвовать в соревнованиях по робототехнике в программе «Движение по линии».